
“SIMULATION OF REENTRY ENVIRONMENTS”
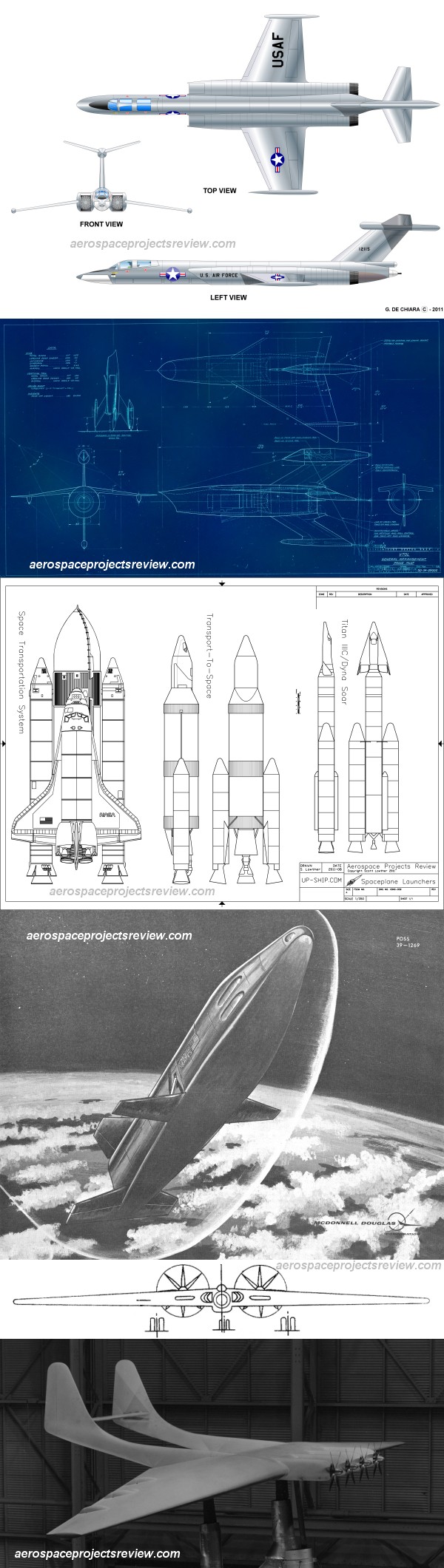
Likely either a Boeing or Martin Co. promotional/presentation image illustrating the “hypersonic research vehicle” phase/stage of the Dyna-Soar program, the first of three such phases/stages. The second as a “manned reconnaissance vehicle” and the third/final as a “full-fledged manned, hypersonic, global, strategic bombardment and reconnaissance system”.
Although I’m sure it’s due to the perspective view, the vehicle looks to be just a bit stretched. The bloppy stars & random brush strokes within the infinite void are likely a clue as to artist, but I'll be damned if I have it in me to pursue further.
8.5” x 11”.
The content of the following is uncomfortably prophetic when considering current disconcerting (to put it mildly) reality. I don’t want my children required to learn Mandarin. Speaking of which, Artemis crews should probably start learning some basic dialog, like requesting lunar orbit insertion clearance, submitting orbital track approvals, and of course, eventually, maybe...requesting permission to land. Maybe/hopefully they already have, I’ve heard it’s a difficult language:
“The proposed project would develop a manned, winged vehicle that would be rocket-boosted to hypersonic speed at an altitude above 30 km. It would then glide from 10,200 to 40,800 km, depending on the mission. The project was to be completed in three phases:
Dyna-Soar I would be a hypersonic research vehicle, boosted to 100 km altitude and 5.5 km/sec in its first version. This velocity would be increased later in the test program by the addition of a second stage. Range on test flights would be between 1800 and 5500 km. The booster could be powered by two of the high-performance liquid fluorine/hydrazine Chariot motors being developed by Bell. If these were not available in time, alternates would be a single Atlas sustainer engine or the X-15 XLR-99. Air-drop flights of the Dyna-Soar I were expected in March 1963, followed by single-stage booster flights a year later, and two-stage near-orbital booster flights by the end of 1965. This phase would replace the Hywards project and be accomplished in collaboration with NACA.
Dyna-Soar II would be a manned hypersonic reconnaissance vehicle, in replacement of the Brass Bell. This would use production versions of the Phase I hardware to boost the glider to 52 km altitude and 5.5 km/sec. From there it would glide at hypersonic speed over a range of 10,200 km. The pilot would monitor the operation of automated reconnaissance systems, which would consist of a high resolution camera, a side-looking radar, and 'ferret' (ELINT) sensors. Operation of these sensors at high speeds and under conditions of high airframe heating were considered to be a major development issue. The booster was expected to be powered by an Atlas sustainer engine, although use of the Chariot booster was a possibility if it could be developed in time. Dyna-Soar II would begin drop tests in January 1966, followed by boosted tests by the end of 1967. An operational weapons system was to be deployed in mid-1969. This would allow it to replace A-12 reconnaissance planes expected to be vulnerable by that time. If needed, Dyna-Soar II could be equipped with an interim nuclear weapons delivery capability if advances in Soviet development of anti-ballistic missile systems warranted that.
Dyna-Soar III would be a full-fledged manned, hypersonic, global, strategic bombardment and reconnaissance system. It would fulfill the Robo requirement, and require a multi-stage launch vehicle to take it to near-orbital velocity (7.6 km/sec) at 90 km altitude. Temperature loads were expected to be no greater than that for Dyna-Soar II, but the cooling system would be required to operate for a much longer period. A significant technical problem was expected to be achieving he desired 900 m CEP weapons delivery accuracy. First glide flight was expected in January 1970, followed by the first all-up boosted spaceflight in mid-1971. The Dyna-Soar III global weapon system would become operational in mid-1974.
The arguments for the weapon system were quite similar to those aired 45 years later. The Air Force was concerned that by the 1970's the ballistic missile would not be able to strike hardened targets with the necessary accuracy. They certainly couldn't hit mobile targets. Boost-glide was a more attractive alternative than air-breathing advanced turbojet or ramjet engines as a B-70 bomber follow-on. A rocket-propelled glider could fly at the entire speed range from Mach 5 to Mach 25 as required by the mission. Air-breathing systems would be much more complex, more difficult to develop, and only operate at lower speeds. Rand Corporation studies indicated anything below Mach 9 could be vulnerable to Soviet air defenses by 1965.
The Dyna-Soar could attack enemy targets from any direction. At its low approach altitude enemy radar systems would only provide three minutes warning of the attack, as opposed to twenty minutes for an ICBM. Unlike a ballistic missile, it could be recalled or retargeted during the mission. On the reconnaissance mission, it could glide over enemy targets between 45 and 90 km altitude, providing better resolution than orbiting satellites at much higher altitudes. The data would be available for analysis within hours of the overflight, compared to having to wait for days for recovery of the capsules from spy satellites. The enemy would also have no warning to conceal its activities, unlike a satellite in its predictable orbit.”
The above paraphrasing & extract are from/at the always wonderfully informative Astronautix website:
www.astronautix.com/d/dynasoar.html
As expected, websites pertaining to the X-20/Dyna-Soar are in abundance.


")
")
")
")
")
")
{kind=link}
{kind=link}